Ensuring the safety of autonomous vehicles (AVs) requires early detection of potential collision risks. Traditional surrogate safety measures often rely on deterministic trajectory predictions, which can overlook uncertainties in traffic interactions. To address this, a novel safety measure called Probabilistic Occupancy Risk Assessment (PORA) has been introduced.
PORA evaluates collision risk by assessing changes in the probability of occupancy around the ego vehicle. This approach allows for a more comprehensive understanding of potential risks by incorporating the uncertainty in vehicle movements. PORA is validated through a scenario-generation-based microsimulation platform, which uses Monte Carlo testing to quantify its effectiveness compared to other surrogate safety measures.
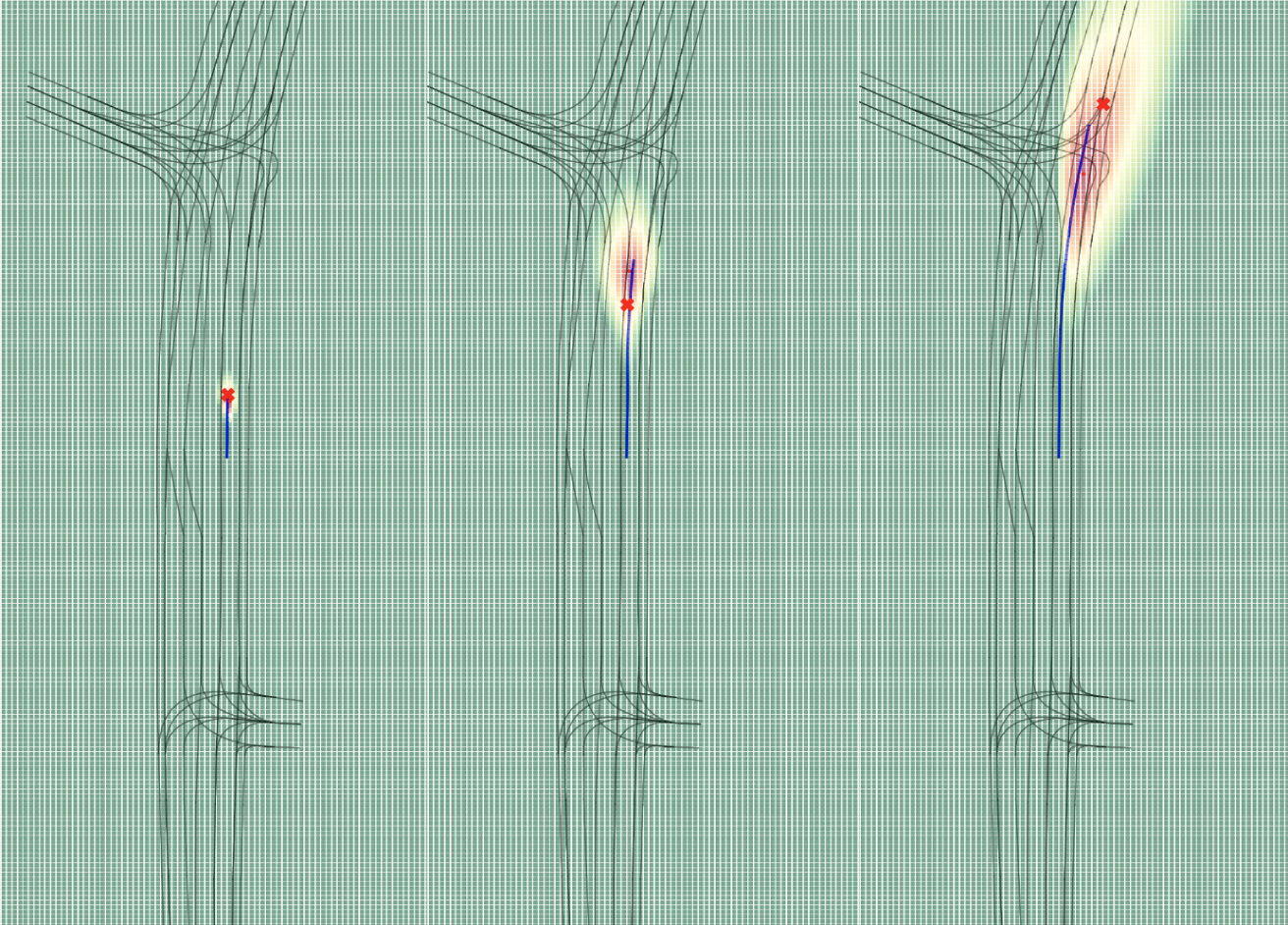
The probabilistic occupancy predictor generates heatmaps that represent the likelihood of vehicles occupying different spaces over time. This predictor employs a Transformer-based encoder to process trajectories and map data, and a pre-trained GAN generator as the decoder to create predictive occupancy heatmaps.
The collision risk evaluation using PORA involves two steps: calculating location-based collision risk and adjusting it based on changes in occupancy probability. This adjustment accounts for both absolute and relative velocities, providing a dynamic assessment of collision risk.
The simulation framework integrates real-world trajectory data and road geometry to create realistic traffic scenarios. An AV controller, trained using reinforcement learning within a Markov Decision Process framework, utilizes the same encoder for perception as the probabilistic predictor. This allows for consistent and effective decision-making in dynamic traffic environments.
Results from the Monte Carlo evaluations demonstrate that PORA provides a more accurate and reliable measure of collision risk compared to traditional Time-To-Collision (TTC) metrics. Especially in mixed and urban scenarios, PORA showed superior performance in distinguishing between safe and crash events.
The introduction of PORA represents a significant advancement in the safety assessment of autonomous vehicles. By accounting for uncertainties in vehicle movements and integrating advanced simulation techniques, PORA offers a robust framework for enhancing the safety and reliability of AV operations.